

Projects
|
Spamsquash
This was an anti-spam filter for email. It used Baysian statistics, Markov Chains and Internet black lists to filter out spam. It worked at over 99.9 percent accuracy. This application was written in Visual C++.
Rhythm Rider
This was a music visualization application I created. I used C++, OpenGL and Python. This project was the most challenging one I've ever done. It included 3D animated graphics. I used quaterions and matricies. I modeled characters in the open source 3D modeling package, Blender. The models were animated in Blender (including the dragon shown in the video below), then I export them to a format I created for my program and imported them into the Rhythm Rider. I also used physical modeling for partical systems. I had to create the terrain. This was a fusion of programming, math and art skills. Everything from the ground up was done by me. Below is a demo video. The idea is that you "ride" the "musical wave."
Music Writer
This is a Flex/Flash application I designed that allows a user to write music and listen to play it back automatically. The user can choose from several instruments to play. The application can be found by going to this link.
FFT Sound Analyzer
I designed two of these applications, one in C++ and the other in Flex/Flash. It allows you to capture sounds via a microphone and then perform and plot an FFT. I used the C++ application especially to do frequency analysis of sounds in order to create instrument sounds for the Music Writer project I mention above. You can find the Flex/Flash version here.
Note Recognizer
This is a program I wrote that is able to identify notes played from a guitar or piano, the two instruments I tested it on. Play the note and it plots it to a music graph. I wrote this program in C++ using Visual Studio. It works by identifying harmonic patterns.
Music Synthesizer
I wrote this program in C#. The purpose of the program was to allow me to explore sounds generated, in order to come up with better instrument sounds for the Music Writer.
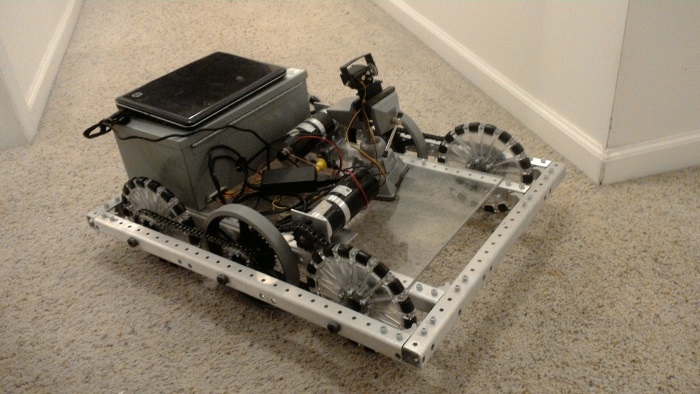
Robot (web servers)
This is a robot my Dad and I worked on. My Dad did a lot of the hardware design. I cut the metal and put it together, wired it up. I also programmed a webserver application in C# (and another one in C++) to communicate with and control the robot remotely over wifi on the local area network. It includes a pan and tilt camera for visibility.
Website
I created a website. This website, in fact. I wrote a Fourier tutorial and some programming tutorials. Also, you can see the Music Writer and Frequency Analyzer on here, both written in Flex/Flash. This website uses HTML, CSS, Javascript and some PHP. Here is the home page. Everything on here is my work.
|
